Welcome 值得信賴的環(huán)境可靠性裝備服務(wù)商
中國(guó)航天科技集團(tuán)有限公司 北京航天希爾測(cè)試技術(shù)有限公司
Welcome 值得信賴的環(huán)境可靠性裝備服務(wù)商
中國(guó)航天科技集團(tuán)有限公司 北京航天希爾測(cè)試技術(shù)有限公司


一、基本概念
在自然界和工程實(shí)際中存在一種現(xiàn)象,其變化是高度不規(guī)則、無(wú)規(guī)律的,不可預(yù)估也不可重復(fù),物理現(xiàn)象的這種變化規(guī)律稱為隨機(jī)的。例如,海浪,地震,陣風(fēng)(湍流),火箭的噴氣噪聲以及不平路面。在隨機(jī)現(xiàn)象作用下,系統(tǒng)產(chǎn)生的振動(dòng)規(guī)律也同樣有隨機(jī)的特征,振動(dòng)過(guò)程是不確定的,這樣振動(dòng)稱為隨機(jī)振動(dòng)。
工程中有很多這樣的實(shí)際例子:
在海浪作用下,海洋平臺(tái)結(jié)構(gòu)、水面艦船、出入水的導(dǎo)彈的振動(dòng);
在湍流作用下,飛行器結(jié)構(gòu)的振動(dòng);
在陣風(fēng)作用下,高聳建筑物、橋梁的振動(dòng);
在地震作用下,所有地面建筑結(jié)構(gòu)的振動(dòng);
在發(fā)動(dòng)機(jī)噴氣噪聲以及大氣氣動(dòng)噪聲的作用下,火箭、導(dǎo)彈等飛行器結(jié)構(gòu)的振動(dòng);
在不平路面的作用下,各種車輛的振動(dòng)。

(圖為巨浪Ⅱ潛射洲際彈道導(dǎo)彈出水瞬間)
這些振動(dòng)都是確定的工程結(jié)構(gòu)在隨機(jī)的外激勵(lì)力或運(yùn)動(dòng)激勵(lì)作用下產(chǎn)生的,都是隨機(jī)振動(dòng)。上述例子共同的特征是:
激勵(lì)和響應(yīng)都不能用時(shí)間的確定函數(shù)來(lái)描述;
對(duì)于某一特定時(shí)刻取值不確定;
對(duì)于單個(gè)試驗(yàn)記錄,從當(dāng)前時(shí)刻的值無(wú)法預(yù)估之后時(shí)刻的值;
兩次相同條件的試驗(yàn)結(jié)果不可能重復(fù),但多次的試驗(yàn)結(jié)果放在一起卻可以發(fā)現(xiàn)現(xiàn)象的某些統(tǒng)計(jì)規(guī)律。
就是說(shuō)振動(dòng)運(yùn)動(dòng)是隨機(jī)的,所以在任一給定時(shí)刻t=t0時(shí)x的精確值不可能精確預(yù)計(jì),我們最多只能求出在時(shí)刻t0,x取值于某一區(qū)間的可能性或概率,給出在某一時(shí)刻的統(tǒng)計(jì)規(guī)律。
(圖為某型汽車行駛過(guò)程中產(chǎn)生的氣動(dòng)噪聲)
二、隨機(jī)振動(dòng)試驗(yàn)
為了研究隨機(jī)振動(dòng),我們采用統(tǒng)計(jì)學(xué)的方法來(lái)研究,如果隨機(jī)過(guò)程的統(tǒng)計(jì)特性不隨時(shí)間變化,稱之為平穩(wěn)隨機(jī)過(guò)程,當(dāng)整個(gè)平穩(wěn)隨機(jī)過(guò)程的統(tǒng)計(jì)特性與每個(gè)樣本的統(tǒng)計(jì)特性相同時(shí),稱這種平穩(wěn)隨機(jī)過(guò)程為各態(tài)歷經(jīng)的過(guò)程。即時(shí)間平均等于集平均。隨機(jī)振動(dòng)試驗(yàn)也就是模擬一種各態(tài)歷經(jīng)的平穩(wěn)隨機(jī)振動(dòng)過(guò)程。
隨機(jī)振動(dòng)控制系統(tǒng)最基本的計(jì)算是快速傅里葉正變換(FFT)及逆變換(IFFT),因?yàn)檫@是隨機(jī)振動(dòng)信號(hào)從時(shí)域變?yōu)轭l域,又從頻域變換為時(shí)域的基礎(chǔ)。
工程中,一般使用激勵(lì)的均方值與頻率帶寬的比值來(lái)評(píng)估,即PSD,其值=(均方)/(f1-f2);可以得出,PSD的單位為units2/Hz;對(duì)于振動(dòng),常用的單位:
加速度隨機(jī)激勵(lì)(m/s2)2/Hz或G2/Hz;
速度隨機(jī)激勵(lì)(m/s)2/Hz;
位移隨機(jī)激勵(lì)(mm)2/Hz。
PSD被描述為帶寬頻率的函數(shù);每一個(gè)帶寬的取其中心位置的頻率值。使用一條包絡(luò)線來(lái)描述整個(gè)變化過(guò)程。在實(shí)際使用中一般用雙對(duì)數(shù)坐標(biāo)系進(jìn)行描述,雖然整個(gè)過(guò)程是隨機(jī)的,但是PSD曲線只有限的遵守其隨機(jī)性。
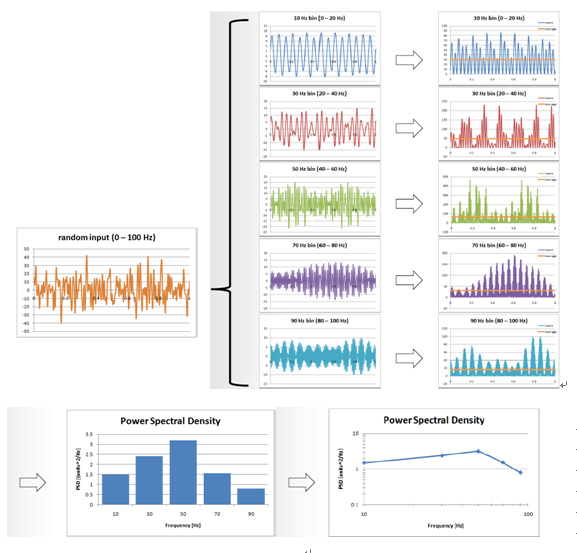
(圖為將時(shí)域信號(hào)轉(zhuǎn)換為頻域內(nèi)的PSD曲線的過(guò)程)
隨機(jī)振動(dòng)量值一般用加速度總均方根值Grms表示,其值等于在頻率上對(duì)加速度譜密度積分后開(kāi)根號(hào)。
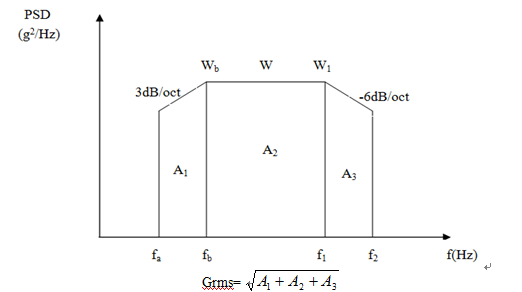
(圖為加速度總均方根值Grms示例)
三、試驗(yàn)實(shí)施
在隨機(jī)測(cè)試中,振動(dòng)臺(tái)是由一個(gè)寬帶隨機(jī)信號(hào)驅(qū)動(dòng)。反饋控制信號(hào)調(diào)整該驅(qū)動(dòng)信號(hào)來(lái)產(chǎn)生一個(gè)與測(cè)試目標(biāo)譜一致的響應(yīng)。控制算法計(jì)算出輸出驅(qū)動(dòng)和輸入控制通道之間的逆?zhèn)鬟f函數(shù),是放大器,振動(dòng)臺(tái),和被測(cè)試件(UUT)響應(yīng)的綜合。通過(guò)逆?zhèn)鬟f函數(shù)和響應(yīng)譜計(jì)算得出一個(gè)輸出驅(qū)動(dòng)譜。再根據(jù)相位隨機(jī)發(fā)生器和逆FFT產(chǎn)生一個(gè)隨機(jī)驅(qū)動(dòng)輸出時(shí)間流。
隨機(jī)振動(dòng)試驗(yàn)的控制,重要的問(wèn)題是實(shí)現(xiàn)振動(dòng)試驗(yàn)過(guò)程的均衡。當(dāng)給系統(tǒng)輸入一個(gè)激勵(lì)信號(hào),系統(tǒng)會(huì)產(chǎn)生一個(gè)響應(yīng)信號(hào)。其響應(yīng)取決于系統(tǒng)的動(dòng)態(tài)特性,振動(dòng)試驗(yàn)系統(tǒng)的傳遞函數(shù)H(ω)(或稱傳輸比)主要是由振動(dòng)臺(tái)和試件的動(dòng)態(tài)特性所決定,其輸入、輸出之間的關(guān)系為
Y(f)=H(f)X(f)(1)
由于在頻譜再現(xiàn)式寬帶隨機(jī)振動(dòng)控制過(guò)程中,我們只關(guān)心頻域的幅值特性,故公式(1)可以變換為輸入、輸出信號(hào)自功率譜函數(shù)的關(guān)系式,即
Sy(ω)=|H(ω) |2Sx(ω)(2)
要使振動(dòng)臺(tái)上控制點(diǎn)滿足試驗(yàn)規(guī)范中所要求的參考譜Sr(ω),即要求Sy(ω)=Sr(ω),則必須使輸給系統(tǒng)的驅(qū)動(dòng)譜(即振動(dòng)臺(tái)輸入信號(hào)的自功率譜)Sx(ω)滿足下式的要求。(3)
公式(3)是隨機(jī)振動(dòng)試驗(yàn)中實(shí)現(xiàn)頻譜均衡的基本公式,均衡的具體過(guò)程如圖1所示。
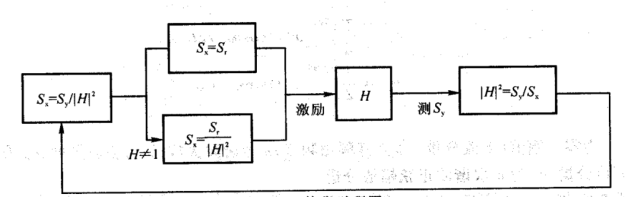
(圖為均衡過(guò)程示意圖)
在控制試驗(yàn)之前,要根據(jù)試驗(yàn)規(guī)范規(guī)定的試驗(yàn)條件設(shè)置參考PSD(Sr),控制的目的是要使控制點(diǎn)的PSD(Sr)與參考PSD(Sr)相符合,由公式(3)可得Sy(ω)=Sr(ω)=Sx(ω)·|H(ω)|2。上式表明,參考PSD(Sr)被設(shè)定后,驅(qū)動(dòng)PSD(Sr)與被控系統(tǒng)的傳輸比|H(ω)|2的乘積應(yīng)等于參考PSD(Sr)。由此我們可以將隨機(jī)振動(dòng)控制的過(guò)程概述為:修改驅(qū)動(dòng)譜PSD(Sr),以補(bǔ)償被控系統(tǒng)的傳輸比H,并最終使它們的乘積與參考PSD(Sr)相一致(允許有一定的誤差)。
在試驗(yàn)控制之前,一般不會(huì)預(yù)先知道被控系統(tǒng)的傳輸比H。為求出被控系統(tǒng)的傳輸比H,可以首先假設(shè)被控系統(tǒng)的傳輸比等于1。這樣,就可以先將參考PSD(Sr)作為驅(qū)動(dòng)PSD(Sr)去驅(qū)動(dòng)振動(dòng)臺(tái)產(chǎn)生振動(dòng)(為了避免超限振動(dòng)對(duì)試件的影響,均衡過(guò)程新開(kāi)始的振級(jí)要比試驗(yàn)振級(jí)小得多,待振動(dòng)控制達(dá)到均衡狀態(tài)后再升至試驗(yàn)要求振級(jí)進(jìn)行試驗(yàn),這個(gè)過(guò)程稱為預(yù)均衡)。然后,測(cè)試控制點(diǎn)的振動(dòng)信號(hào)的PSD(Sy)。這時(shí),我們?cè)倮靡阎谋豢叵到y(tǒng)的輸入(Sr)和測(cè)試的輸出(Sy1)求出它的傳輸比H1,即(4)求得被控系統(tǒng)的傳輸比H1后,就可以修正新的驅(qū)動(dòng)PSD(Sr1),即(5)將新的驅(qū)動(dòng)PSD(Sr1)激勵(lì)振動(dòng)臺(tái)產(chǎn)生振動(dòng)后,又可測(cè)得新的Sy2,求出新的傳輸比H2。由于被控系統(tǒng)的非線性和時(shí)變形,每次求得的傳輸比不可能完全相同。因此必須通過(guò)反復(fù)疊代的過(guò)程才能達(dá)到要求并保持均衡狀態(tài)。反復(fù)疊代不斷修正,最終使控制譜落入?yún)⒖甲V的容差帶內(nèi)。
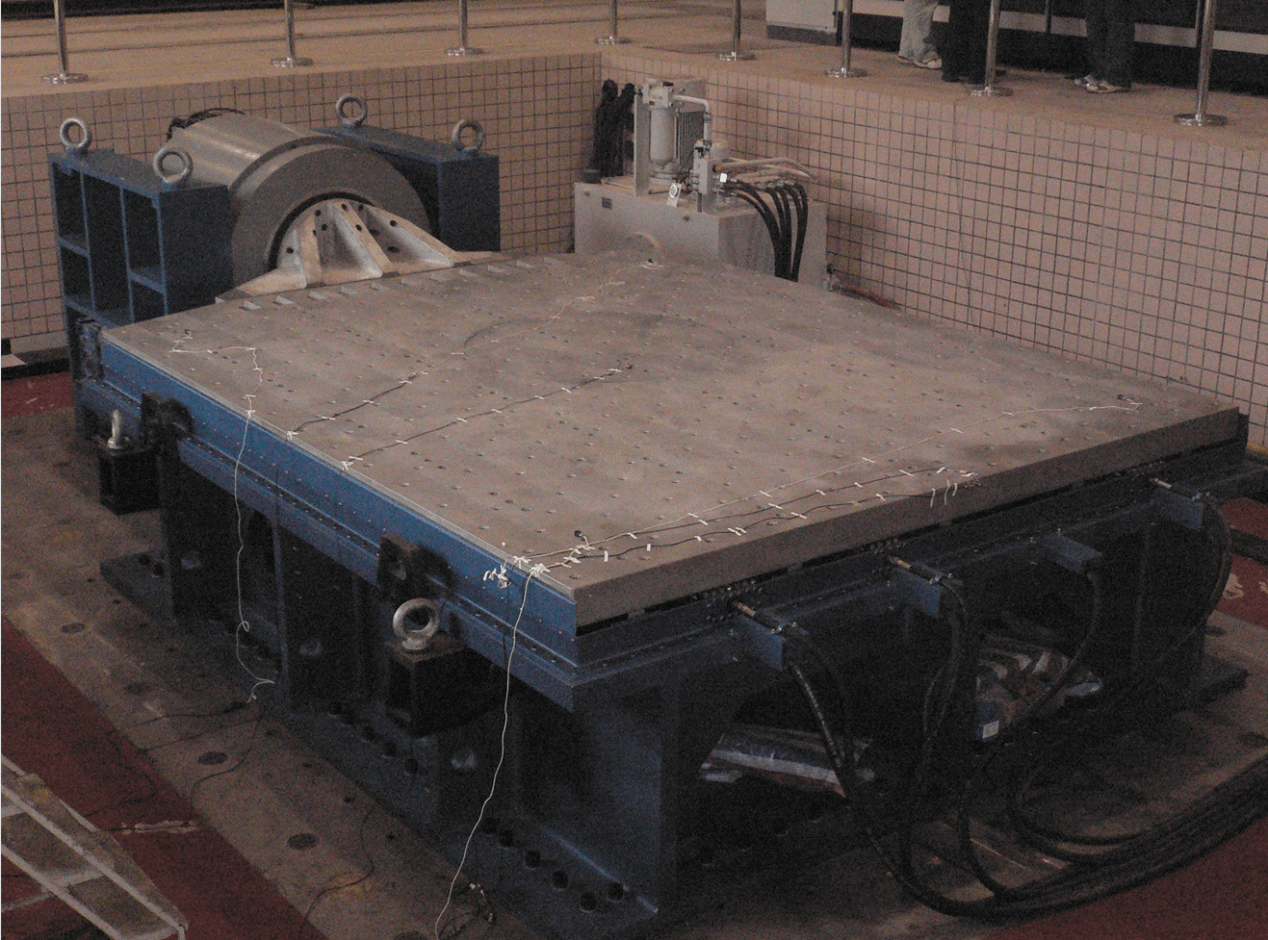
(圖為希爾20T振動(dòng)臺(tái),臺(tái)面尺寸2000×2000mm)
航天希爾振動(dòng)臺(tái)分成六大系列,I系列感應(yīng)式振動(dòng)臺(tái)、L系列小型風(fēng)冷振動(dòng)臺(tái)、M系列風(fēng)冷振動(dòng)臺(tái)、H系列水冷振動(dòng)臺(tái)、LS系列大位移振動(dòng)臺(tái)、TVA系列三軸多自由度振動(dòng)臺(tái)。航天希爾振動(dòng)臺(tái),推力200公斤----70噸,隨機(jī)加速度高達(dá)100G以上,能滿足各種需求的隨機(jī)振動(dòng)試驗(yàn)。
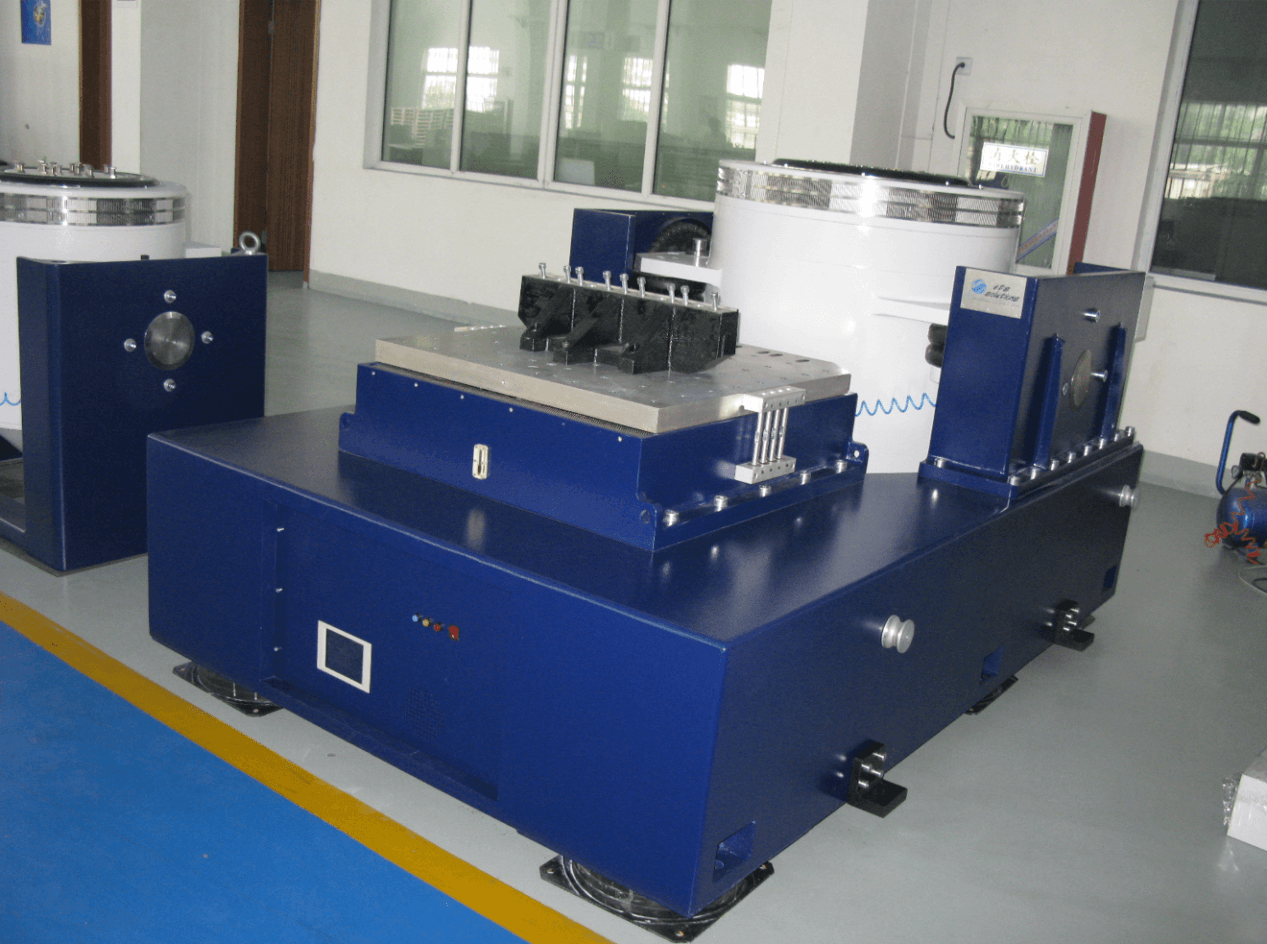 (圖為希爾7T高加速度振動(dòng)臺(tái),可實(shí)現(xiàn)最大加速度總均方根值100Grms隨機(jī)振動(dòng))
(圖為希爾7T高加速度振動(dòng)臺(tái),可實(shí)現(xiàn)最大加速度總均方根值100Grms隨機(jī)振動(dòng))
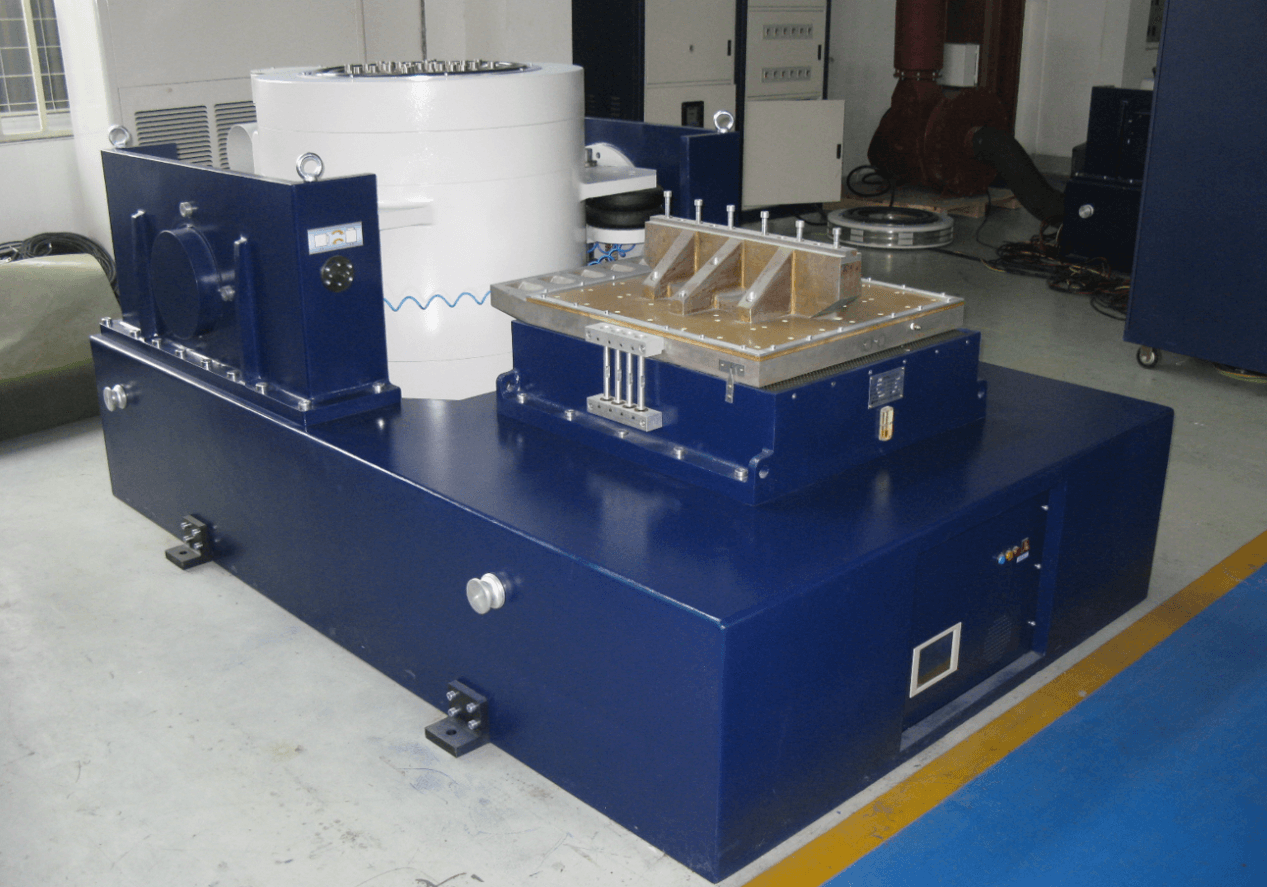
(圖為希爾5T振動(dòng)臺(tái),可實(shí)現(xiàn)最大p-p位移100mm隨機(jī)振動(dòng))
四、試驗(yàn)標(biāo)準(zhǔn)
航天希爾振動(dòng)臺(tái)可滿足于多項(xiàng)隨機(jī)振動(dòng)試驗(yàn)標(biāo)準(zhǔn),現(xiàn)列舉一些常用的相關(guān)試驗(yàn)方法,如下:
GB/T 2423.56-2018《環(huán)境試驗(yàn) 第2部分:試驗(yàn)方法 試驗(yàn)Fh:寬帶隨機(jī)振動(dòng)和導(dǎo)則》;
GJB 360B-2009《電子及電氣元件試驗(yàn)方法》方法214;
GJB 548B-2005《微電子器件試驗(yàn)方法和程序》方法2026.1;
MIL-STD-202G:2002《電子電器部件測(cè)試標(biāo)準(zhǔn)》方法214A;
GJB150.16A-2009《軍用裝備實(shí)驗(yàn)室環(huán)境試驗(yàn)方法 第16部分:振動(dòng)試驗(yàn)》;
MIL-STD-810H-2019《環(huán)境工程考慮和實(shí)驗(yàn)室試驗(yàn) 第二部分 實(shí)驗(yàn)室試驗(yàn)方法》514.8
RTCA DO160G:2010《機(jī)載設(shè)備環(huán)境條件和測(cè)試程序》第8章 振動(dòng)。
五、小結(jié)
隨機(jī)振動(dòng)作為一種最普遍的振動(dòng)試驗(yàn)方法,能接近真實(shí)的還原實(shí)際振動(dòng)環(huán)境,越來(lái)越多的應(yīng)用于模擬產(chǎn)品實(shí)際使用環(huán)境中受到的振動(dòng)。北京航天希爾測(cè)試技術(shù)有限公司已經(jīng)積累多年豐富的工程經(jīng)驗(yàn),能根據(jù)不同外形尺寸、材質(zhì)結(jié)構(gòu)的產(chǎn)品或特殊要求,制定專項(xiàng)試驗(yàn)方案,以達(dá)到精準(zhǔn)有效的將振動(dòng)應(yīng)力施加到產(chǎn)品上,保證試驗(yàn)的合理與有效。北京航天希爾提供交鑰匙工程服務(wù),并提供免費(fèi)安裝調(diào)試、培訓(xùn)等服務(wù),擁有完善的售后服務(wù)體系,令客戶滿意就是我們前進(jìn)的最大動(dòng)力!
